

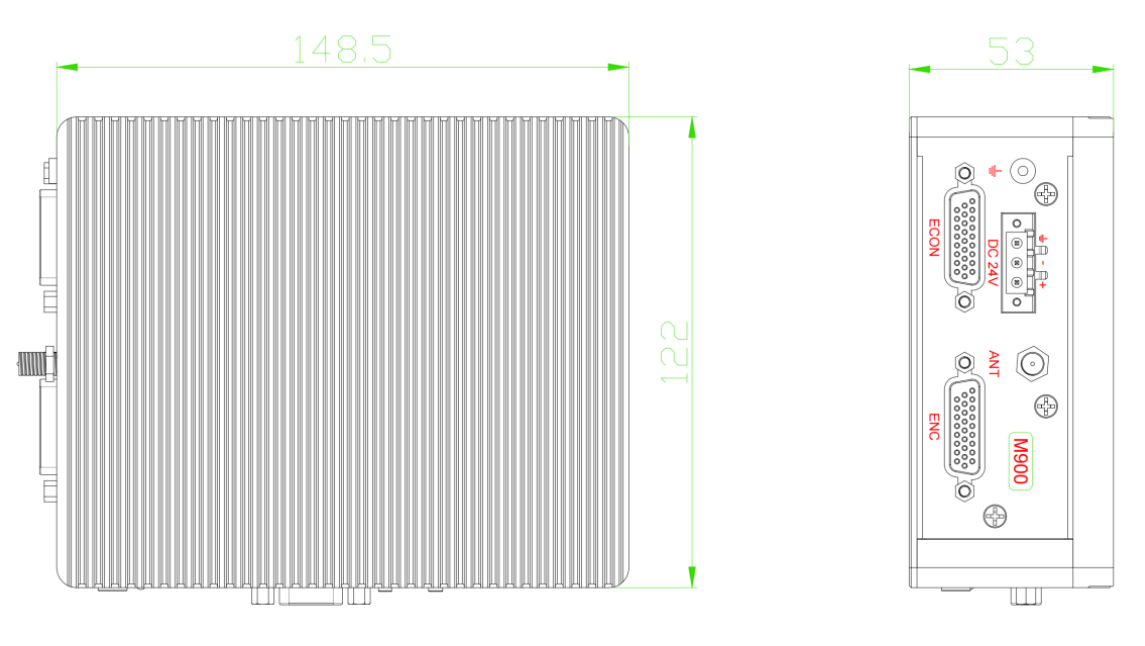
规 格 型 号:M900
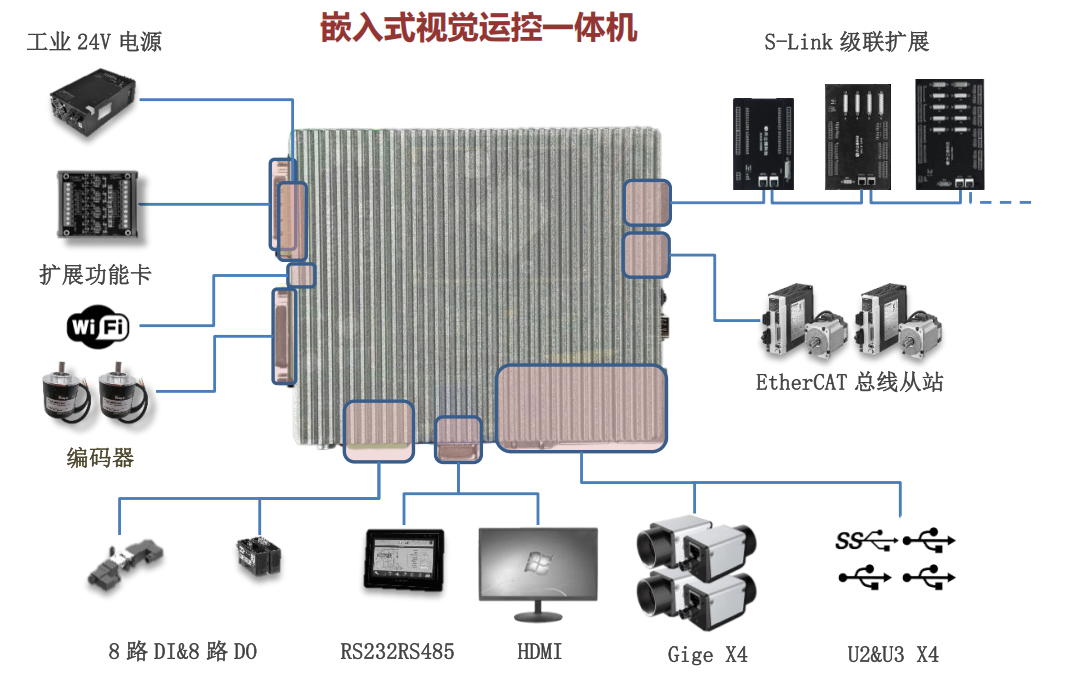
M900是基于Linux系统的嵌入式控制器,是机器视觉、运动控制一体化的独立式控制器,支持多种编程语言QT、C++、C#、C、Lua语言等,可广泛应用于军工、医疗、半导体、新能源、汽车、3C、机械加工等行业应用,为客户提供PLC和IPC之外的第三种选择,实现高可靠性、高扩展性、高易用性、高性价比的新型产品解决方案。
1. 支持4xGigE,1xUSB3.0,3x USB2.0,1x HDMI
2. 支持1xRS232,1xRS485,2xCAN2.0,1xWiFi
3. 输出口的电流驱动能力为500mA,可驱动部分电磁阀
4. 开关量输入均经过外部阻容滤波和内部通过设置滤波时间来设置滤波信号频率段
5. 各轴专用的正负限位信号和原点信号
6. 支持 3 路差分 A、B、Z 相编码器
7. 支持通道(坐标系)直线插补、圆弧插补等
8. 支持点位(P2P)、速度(Jog)、软启停、缓冲区运动、PT运动等功能
9. 具有2路256点缓冲深度的位置比较和位置锁存功能
10. 本地通用IO包括8路光隔离输入通道(NPN型),8路光隔离输出
11. 支持多种功能卡的级联扩展功能
12. 支持EtherCAT总线16轴运动控制
13. 支持4轴联动、轨迹规划、连续插补、前瞻预处理连续轨迹IO控制功能
14. 支持2维位置比较、 改变目标位置和目标速度、同步跟随功能
15. 支持软着陆、软启动,及电子齿轮功能
16. 支持软件专用芯片加密功能
| 类别 | E系列 | E450 | E850 | E1250 | E516 | RT3316 | |
| 描述 | 4轴运动系列 | 8轴运动系列 | 12轴运动系列 | 16轴运动系列 | 16轴运动系列 | ||
| 通讯方式 | 自定义报文结构 | ETherCAT总线 | ETherCAT总线 | ||||
| 通讯接口 | 双网口 | ||||||
| 编程环境 | Windows、Linux | ||||||
| 编程语言 | C\C++\C#\QT\LABVIEW | ||||||
| 规划器 | ARM+FPGA | ||||||
| 基本控制参数 | 脉冲输出方式 | PUL/DIR;CW/CCW | PUL/DIR;CW/CCW | PUL/DIR;CW/CCW | ETherCAT协议 | ETherCAT协议 | |
| 输出脉冲最高频率 | 8M | 8M | 8M | - | - | ||
| 编码器最高反馈频率 | 8M | 8M | 8M | 8M | 8M | ||
| 插补周期 | 500µs | 500µs | 500µs | 500µs | 1mS | ||
| 手轮最高输入频率 | - | 2M | 2M | 2M | 2M | ||
| 伺服信号ALM、ALMRST、SVON、INP | √ | √ | √ | - | - | ||
| Home 限位EL | √ | √ | √ | √ | √ | ||
| 信号滤波 | 7层 | 7层 | 7层 | 7层 | 7层 | ||
| 通用数字量输入/数字量输出 | 16DI/16DO | 16DI/16DO | 24DI/24DO | 16DI/16DO | 16DI/24DO | ||
| 通用数字量输出驱动能力 | 500mA MOS管 | 500mA MOS管 | 500mA MOS管 | 500mA MOS管 | 500mA MOS管 | ||
| 点位运动控制 | 运动类型 | 回原点运动 | √ | √ | √ | √ | √ |
| JOG运动 | √ | √ | √ | √ | √ | ||
| 速度规划 | T型曲线运动规划 | √ | √ | √ | √ | √ | |
| S型曲线运动规划 | √ | √ | √ | √ | √ | ||
| 运动功能 | 点位运动在线变位功能 | √ | √ | √ | √ | √ | |
| 点位运动在线变速功能 | √ | √ | √ | √ | √ | ||
| 辅助功能 | 二维位置比较输出 | √ | √ | √ | √ | - | |
| 高速位置比较输出 | 2 | 2 | 2 | 2 | 2 | ||
| 硬件急停功能 | √ | √ | √ | √ | √ | ||
| 软件限位功能 | √ | √ | √ | √ | √ | ||
| 高速锁存 | 2 | 2 | 2 | 2 | 2 | ||
| 总线I/0扩展功能 | √ | √ | √ | √ | √ | ||
| 加密功能 | √ | √ | √ | √ | √ | ||
| 连续插补 | 插补坐标系 | 座标系组数 | 2组 | 4组 | 4组 | 4组 | 4组 |
| 座标系插补缓存段数 | 2000段*2 | 2000段*2 | 2000段*2 | 2000段*2 | 350段 | ||
| 插补段类型 | 直线插补 | √ | √ | √ | √ | √ | |
| 多轴联动轴数 | 4 | 5 | 5 | 5 | 5 | ||
| 平面与空间圆弧插补 | √ | √ | √ | √ | √ | ||
| 连续插补及辅助功能 | 连续插补拐角平滑过渡功能 | √ | √ | √ | √ | √ | |
| 连续插补运动延时功能 | √ | √ | √ | √ | √ | ||
| 连续插补每段插补速度可设功能 | √ | √ | √ | √ | √ | ||
| 连续插补辅助轴运动跟随功能 | √ | √ | √ | √ | √ | ||
| 连续插补运动暂停、继续与弃置 | √ | √ | √ | √ | √ | ||
| 比例因子补偿功能 | √ | √ | √ | √ | √ | ||
| 连续插补缓存I/O | 连续插补立即I/0输出 | √ | √ | √ | √ | √ | |
| 连续插补立即I/O输出+延时翻转 | √ | √ | √ | √ | √ | ||
| 轨迹段延时开关I/0 | √ | √ | √ | √ | √ | ||
| 运动过程中等待I/0输入功能 | √ | √ | √ | √ | √ | ||
| 高级控制 | 特殊应用 | 电子齿轮 | √ | √ | √ | √ | √ |
| PSO | √ | √ | √ | √ | √ | ||
| 同步跟随 | √ | √ | √ | √ | √ | ||
| 电子凸轮 | - | - | - | - | √ | ||
| 智能前瞻与处理 | - | - | - | - | √ | ||
| 螺旋插补 | - | - | - | - | √ | ||
| 矢量防抖 | - | - | - | - | √ | ||
| 可编程实时内核 | - | - | - | - | √ | ||
| 名称 | 版本号 | 格式 | 大小 | 下载 |
|---|---|---|---|---|
| 升立德SDK-M900 | ||||
